




Cognitive Neurorobotics Research Unit
Professor Jun Tani

Ted, Hiroki, Nadine, Federico, Alex, Rui (04/28/2023)
Ted, Hiroki, Nadine, Federico, Alex, Rui (04/28/2023)
Abstract
CNRU started in September 2017. Currently CNRU consists of 2 staff scientists, 2 postdoc researchers, 1 technical staff, 7 Ph.D. students, 1 rotation student, 1 visiting researcher, and one administrator. The group is investigating the essential mechanisms on human embodied cognition by using frameworks of predictive coding, active inference, and model-based reinforcement learning while conducting various robotics experiments.
1. Staff
As of March 31, 2023
- Prof. Jun Tani, Professor
- Dr. Takazumi Matsumoto, Staff Scientist
- Dr. Jeffrey Queißer, Staff Scientist
- Dr. Jorge Gallego Perez, Postdoctoral Scholar
- Dr. Fabien Benureau, Postdoctoral Scholar
- Dr. Federico Sangati, Technical Staff
- Ms. Nadine Wirkuttis, PhD Student
- Mr. Wataru Ohata, PhD Student
- Mr. Prasanna Vijayaraghavan, PhD Student
- Mr. Hiroki Sawada, PhD Student
- Mr. Alexander Baranski, PhD Student
- Mr. Theodore Jerome Tinker, PhD Student
- Mr. David Pere Tomas Cuesta, PhD Student
- Mr. Rui Fukushima, Rotation Student
- Dr. Jochen Steil, Visiting Scholar, Theoretical Sciences Visiting Program
- Dr. Jeffrey White, Visiting Researcher
- Ms. Tomoe Furuya, Research Unit Administrator
2. Collaborations
2.1 Computational models on reinforcement learning
- Description: Model studies on hierarchical, model-based, variational reinforcement learning.
- Type of collaboration: Joint research
- Researchers: Prof. Kenji Doya, Neural Computation Unit, OIST
2.2 Computational models on the sense of self
- Description: Model studies on the sense of primitive and narrative selves.
- Type of collaboration: Joint research
- Researchers: Prof. Jeff White, Twente University
3. Activities and Findings
3.1 Incremental Learning of Goal-Directed Actions in a Dynamic Environment by a Robot using Active Inference
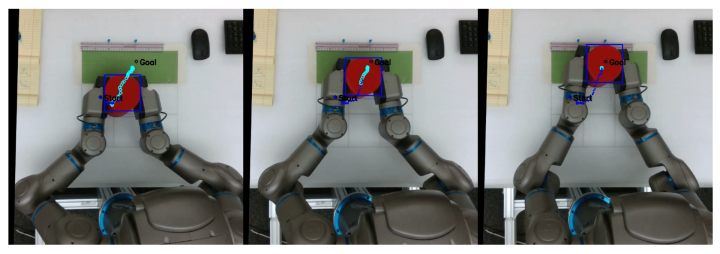
This study investigated how a physical robot can adapt goal-directed actions in dynamically changing environments, in real-time, using an active inference-based approach with incremental learning from human tutoring examples. Using our active inference-based model, while good generalization can be achieved with appropriate parameters, when faced with sudden, large changes in the environment, a human may have to intervene to correct actions of the robot in order to reach the goal, as a caregiver might guide the hands of a child performing an unfamiliar task. In order for the robot to learn from the human tutor, we propose a new scheme to accomplish incremental learning from these proprioceptive–exteroceptive experiences combined with mental rehearsal of past experiences. Our experimental results demonstrate that using only a few tutoring examples, the robot using our model was able to significantly improve its performance on new tasks without catastrophic forgetting of previously learned tasks.
3.2 PCE simulation toolkit: a platform for perceptual crossing experiment research.
The Perceptual Crossing Experiment (PCE) has been the object of study for over a decade, and aims at explaining how we perceive, interact with, and understand each other in real-time. In addition to human participant studies, a number of computational models have investigated how virtual agents can solve this task. However, the set of implementation choices that has been explored to date is rather limited, and the large number of variables that can be used make it very difficult to replicate the results. The main objective of this paper is to describe the PCE Simulation Toolkit we have developed and published as an open-source repository on GitHub. We hope that this effort will help make future PCE simulation results reproducible and advance research in the understanding of possible behaviors in this experimental paradigm. At the end of this paper, we present two case studies of evolved agents that demonstrate how parameter choices affect the simulations.
4. Publications
4.1 Journals
- Matsumoto, T., Ohata, W., & Tani, J. (2023). Incremental Learning of Goal-Directed Actions in a Dynamic Environment by a Robot using Active Inference. Entropy, 25(11), 1506. LINK
- Tani, J. (2023). 自由エネルギー原理に基づく認知脳型ロボット研究 Studies of Cognitive Neurorobotics Based on the Free Energy Principle. 日本ロボット学会誌, 41(7), 609-615. PDF
- Sangati, F., & Fukushima, R. (2023). PCE simulation toolkit: a platform for perceptual crossing experiment research. Frontiers in Neurorobotics. DOI 10.3389/fnbot.2023.1048817 LINK
4.2 Books and refereed conference proceedings
- Sangati, E., Sangati, F., Slors, M., & Doya, K. (2024). The Collaborative Abilities of ChatGPT Agents in a Number Guessing Game. 29th International Symposium on Artificial Life and Robotics, Beppu, Japan, January 24, 2024.
- Sangati, E., Sangati, F., Cheng, Y. S., & Yu-Chan Chang, A. (2023). Between Individual Brains and Collective Behavior: Multi-level Emergence in a Group Formation Task. In Artificial Life Conference Proceedings 35 (Vol. 2023, No. 1, p. 30). Sapporo, Japan, July 27, 2023.
- Han, D., Doya, K., Li, D., & Tani, J. (2023). Habits and goals in synergy: a variational Bayesian framework for behavior. DOI: 10.31234/osf.io/v63yj LINK
- Sawada, H., Ohata, W., & Tani, J. (2023). Human-Robot Kinaesthetic Interaction Based on Free Energy Principle. arXiv preprint arXiv:2303.15213. LINK
4.3 Invited seminars and talks
- Keynote address, Tani, j., Exploring robotic minds using the free energy principle. AWARE-AI NSF Research Traineeship Program, January 16th, 2024, Online.
- Keynote speech, Tani, J., Cognitive Neurorobotics Studies Utilizing the Free Energy Principle: Towards an Ontological Understanding of the Mind. ALIFE 2023, Sapporo, July 24, 2023.
- Invited talk, Tani, J. Exploring robotic minds using the free energy principle. Brain & Neuroscience Workshop 2023 (Online) - Microsoft Research, June 20, 2023.
- Invited talk, Tani, J. Cognitive Science Colloquium, Univ. of Tubingen, May 25, 2023.
- Invited talk, Tani, J. Doctoral Seminar Talk at Technical University of Munich 2023 May 22, 2023.
5. Intellectual Property Rights and Other Specific Achievements
Nothing to report
6. Meetings and Events
6.1 Seminars
LLM Seminar: AI isn't the problem — it's the solution
- Date: Friday, February 9, 2024 - 11:00 to 12:00
- Venue: L5DE13, Lab 5 and Zoom
- Speaker: Andrew Ng, Stanford University and Andrej Karpathy, Open AI
The Collaborative Abilities of ChatGPT Agents in a Number Guessing Game
- Date: Friday, January 19, 2024 - 12:00 to 13:00
- Venue: L5DE13, Lab 5
- Speaker: Katja Sangati, OIST
The AI Odyssey: Mirella Lapata's Exclusive Insight at OIST's LLM Seminar
- Date: Friday, December 15, 2023 - 11:00 to 12:00
- Venue: L5DE13, Lab 5 and Zoom
Role of engagement fund: Does it have a relevance to you?
- Date: Monday, December 4, 2023 - 11:00 to 12:00
- Venue: L4E48, Lab 4
- Speaker: Mr. Shoichi Oka, Partner Solaris Management Co., Ltd.
LLM (Large Language Model) + Android
- Date: Tuesday, September 5, 2023 - 16:00 to 17:30
- Venue: L4E01, Lab 4 (Hybrid)
- Speaker: Prof. Takashi Ikegami, The University of Tokyo
Development of self/other distinction and perspective taking via Predictive Deep Learning
- Date: Friday, September 1, 2023 - 10:00 to 11:00
- Venue: C700, Lab 3 (Hybrid)
- Speaker: Prof. Hiroyuki Iizuka, Hokkaido University
Evolving bi-directional referential communication in minimal autonomous agents
- Date: Wednesday, July 19, 2023 - 16:00 to 17:10
- Venue: L4F01, Lab 4 (Hybrid)
- Speaker: Prof. Seth Bullock, University of Bristol
Soft Robotics: Understanding Design Principles and the Implications of Soft Bodies
- Date: Wednesday, July 19, 2023 - 14:30 to 15:40
- Venue: L4F01, Lab 4 (Hybrid)
- Speaker: Prof. Koh Hosoda, Kyoto University
Brain-Motivated Computation: A Journey from Neural Circuitry to Cognitive Control Systems
- Date: Wednesday, June 28, 2023 - 10:00 to 11:00
- Venue: Zoom
- Speaker: Dr. Alexander G. Ororbia II, Rochester Institute of Technology
The man behind the curtain: AI, Complexity and Social Systems
- Date: Monday, June 5, 2023 - 12:00 to 13:00
- Venue: C700, Lab 3 (Hybrid)
- Speaker: Marcin Korecki, ETH Zürich
6.2 Events
The 1st International Workshop on Cognitive Neurorobotics
- Date: Monday, March 18, 2024 to Tuesday, March 19, 2024
- Venue: OIST Conference Center meeting rooms #1, 2, 3
- Speaker:
* Stefano Nolfi, CNR-ISTC
* Jochen Triesch, Frankfurt Institute for Advanced Studies
* Takashi Ikegami, The University of Tokyo
* Yasuo Kuniyoshi, The University of Tokyo
* Erhan Oztop, Ozyegin University
* Kohei Nakajima, The University of Tokyo
* Tom Froese, OIST
7. Other
Nothing to report