





知覚交差パラダイムでは、二者の関わりを最小限の感覚運動に制限します。2人の被験者は手の動きを介して相互作用することができ、相互作用のあらゆる変数を十分に測定できるシンプルな設定となっており、複雑で自由な相互作用を可能にする汎用性を備えています。
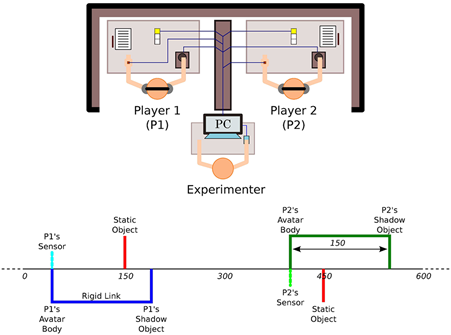
相互作用の各被験者は共通の仮想直線(または円)上でカーソルを動かし、カーソルが直線上の他の物体と同じ位置に来ると触覚フィードバックを受け取ります。他の物体には、もう一方の被験者のカーソル、静止物体、またはコンピューターが制御する他の移動物体が含まれます。
Auvray、LenayおよびStewartによって導入されたオリジナル版(2009)では、各被験者はコンピューターマウスを用いてカーソルを制御し、フィードバックとして空いている方の手に振動を受け取ります。
本ユニットでは現在、より広い範囲の触覚相互作用と、より生態学的なヒューマン・マシン相互作用を検討できる、次世代の知覚交差実験のセットアップを開発中です。この新しいセットアップを、本ユニットのEEGハイパースキャニング装置と組み合わせて使用し、触覚相互作用におけるヒトとヒトのカップリングを調べます。


References
Auvray, Malika, Charles Lenay, and John Stewart. “Perceptual Interactions in a Minimalist Virtual Environment.” New Ideas in Psychology 27, no. 1 (April 2009): 32–47. https://doi.org/10.1016/j.newideapsych.2007.12.002.
Zapata-Fonseca, Leonardo, Dobromir Dotov, Ruben Fossion, and Tom Froese. “Time-Series Analysis of Embodied Interaction: Movement Variability and Complexity Matching As Dyadic Properties.” Frontiers in Psychology 7 (December 12, 2016). https://doi.org/10.3389/fpsyg.2016.01940.