The Torobo Arm is a 19 kg device built for robotic research. It is constituted by 6 joints, each ranging between +/-110 degrees to +/-170 degrees plus an additional gripper.
We program the robot arm for human-subject experiments in Python running on a PC via ROS (Robot Operating System) libraries. The PC is connected to the robot master controller via a USB cable. Our current experimental setup explores two modalities with which subjects can interact with the robot arm:
- EXTERNAL FORCE: The subject actively controls the movement of the robot arm, which sends the real-time trajectory data (joint positions and angular velocities) to the PC which records them.
- TRAJECTORY MODE: The arm plays back a previously recorded trajectory data that can be experienced by the same or another subject.
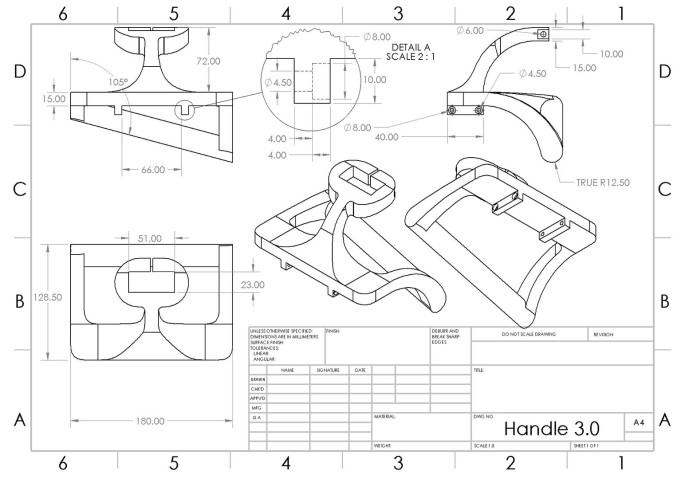
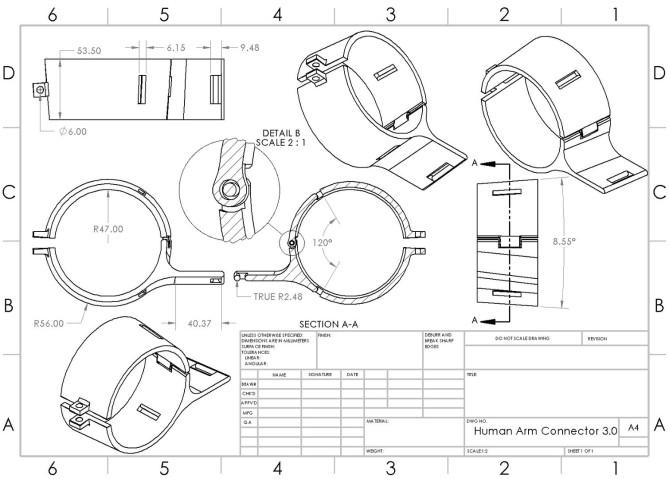
Additionally, our unit has the expertise to build custom gripper replacements to allow us to manipulate the way in which participants interact with the arm.